Pouliční kriminalita je v moderním století velmi běžná. Každý musí mít pocit bezpečí, když je doma, ať už spí v noci nebo během dne. Na trhu je tedy k dispozici mnoho bezpečnostních výstražných systémů. Tyto systémy jsou velmi efektivní, ale nákladné. A zloděj poplach nebo poplach vetřelce je v podstatě elektronické zařízení, které vydá poplach, když detekuje vetřelce v domácnosti. Můžeme si vyrobit poplašný obvod pro vetřelce doma, který bude téměř stejně účinný pro konkrétní vzdálenost a bude mít velmi nízkou cenu.

Bezpečnostní alarm
Tento článek je o poplachu vetřelce pomocí čidla Arduino a PIR. Když PIR senzor detekuje vetřelce, vyšle signál Arduinu a Arduino vydá poplach. Tento obvod je velmi jednoduchý a bude navržen na veroboardu. Tento Veroboard bude instalováno na tom místě domu, kde je větší nebezpečí vniknutí dovnitř domu.
Jak navrhnout poplach vetřelce na základě senzoru PIR?
Nejlepším způsobem, jak zahájit jakýkoli projekt, je vytvořit seznam komponent a projít krátkou studií těchto komponent, protože nikdo nebude chtít držet uprostřed projektu jen kvůli chybějící komponentě. Udělejme si seznam komponent, pořiďte si je a začněte s projektem. Deska Vero Board je preferována pro montáž obvodu na hardware, protože pokud sestavíme komponenty na prkénku, mohou se od něj oddělit a obvod se zkrátí, proto je preferován Veroboard.
Krok 1: Shromažďování komponent (hardware)
- 10k-ohmový rezistor
- VEDENÝ
- Bzučák
- 9V baterie
- 9V baterie Clip
- Veroboard
- Připojovací vodiče
- Digitální multimetr
Krok 2: Potřebné komponenty (software)
- Proteus 8 Professional (lze stáhnout z Tady )
Po stažení Proteus 8 Professional na něm navrhněte obvod. Zahrnul jsem sem softwarové simulace, aby pro začátečníky mohlo být výhodné navrhnout obvod a provést příslušná připojení k hardwaru.
Krok 3: Práce na okruhu
Práce tohoto obvodu je velmi jednoduchá. Nejprve je stav snímače PIR nastaven na LOW. to znamená, že není detekován žádný pohyb. Když bude PIR senzor detekovat pohyb, vyšle signál do mikrokontroléru. Mikrokontrolér poté zapne bzučák a LED. Pokud není detekován žádný pohyb, LED a bzučák zůstanou ve vypnutém stavu.
Krok 4: Sestavení komponent
Nyní, když známe hlavní propojení a také kompletní okruh našeho projektu, pojďme pokročit a začít vyrábět hardware našeho projektu. Je třeba mít na paměti jednu věc, že obvod musí být kompaktní a komponenty musí být umístěny tak blízko.
- Vezměte Veroboard a otřete jeho stranu měděným povlakem škrabkou.
- Nyní umístěte komponenty opatrně a dostatečně blízko, aby se obvod příliš nezvětšil
- Vezměte dva kusy záhlaví Female a umístěte je na Veroboard takovým způsobem, aby vzdálenost mezi nimi byla stejná jako šířka nano desky Arduino. Později do těchto záhlaví připojíme desku Arduino nano.
- Opatrně proveďte připojení pomocí páječky. Pokud při vytváření připojení dojde k chybě, zkuste připojení odpájet a připojení znovu správně připájet, ale nakonec musí být spojení pevné.
- Jakmile jsou všechna připojení provedena, proveďte test spojitosti. V elektronice je testem kontinuity kontrola elektrického obvodu, aby se zkontrolovalo, zda proud teče v požadované cestě (zda je to jistě úplný obvod). Test spojitosti se provádí nastavením malého napětí (zapojeného v uspořádání s LED nebo rozruch vytvářející část, například piezoelektrický reproduktor) zvoleným způsobem.
- Pokud test spojitosti proběhne, znamená to, že obvod je adekvátně proveden podle potřeby. Nyní je připraven k testování.
- Připojte baterii k obvodu.
Nyní ověřte všechna připojení podle níže uvedeného schématu zapojení:

Kruhový diagram
Krok 5: Začínáme s Arduino
Pokud ještě nejste obeznámeni s Arduino IDE, nebojte se, protože níže je vysvětlen krok za krokem postup nastavení a používání Arduino IDE s deskou mikrokontroléru.
- Stáhněte si nejnovější verzi Arduino IDE z Arduino.
- Připojte desku Arduino Nano k notebooku a otevřete ovládací panel. na ovládacím panelu klikněte na Hardware a zvuk . Nyní klikněte na Zařízení a tiskárny. Zde najděte port, ke kterému je připojena deska vašeho mikrokontroléru. V mém případě ano COM14 ale na různých počítačích je to jiné.
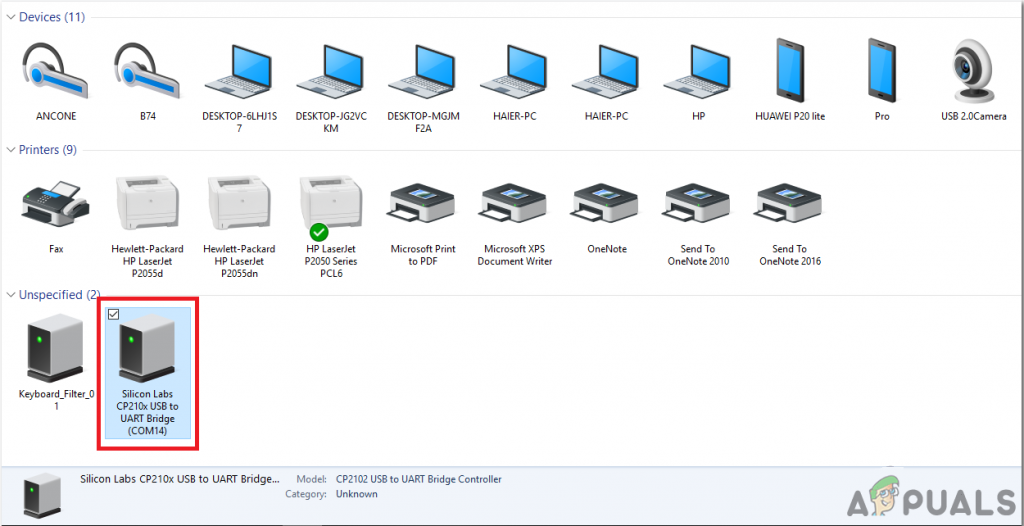
Hledání přístavu
- Klikněte na nabídku Nástroj. a nastavte desku na Arduino Nano z rozevírací nabídky.
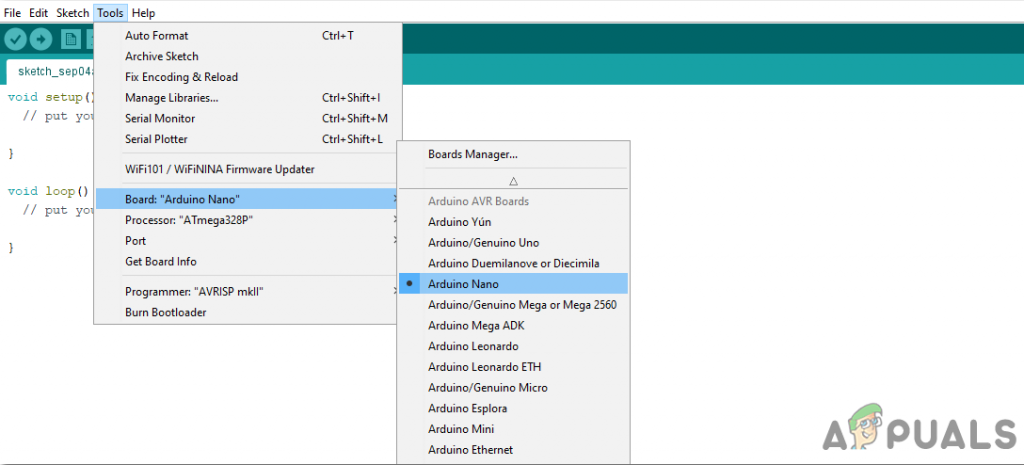
Nastavovací deska
- Ve stejné nabídce nástrojů nastavte port na číslo portu, které jste pozorovali dříve v souboru Zařízení a tiskárny .
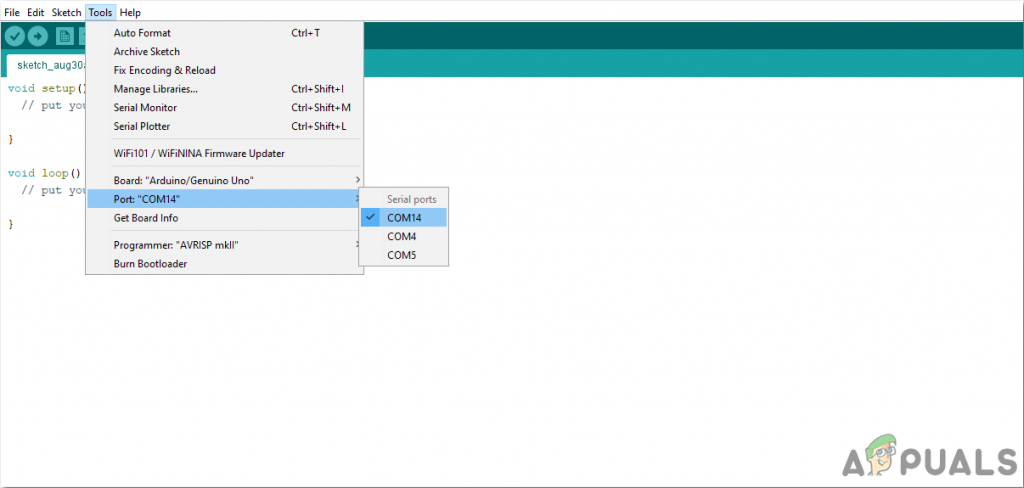
Nastavení portu
- Ve stejné nabídce nástrojů nastavte procesor na ATmega328P (starý bootloader).
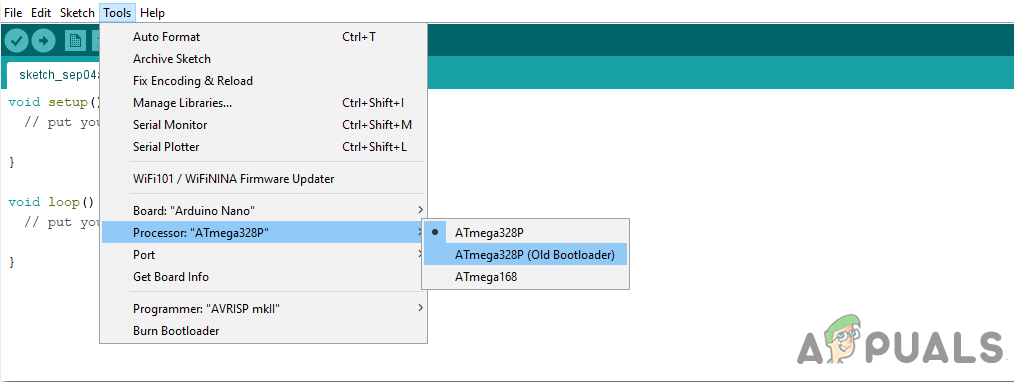
Procesor
- Stáhněte si níže přiložený kód a vložte jej do svého Arduino IDE. Klikněte na nahrát tlačítko pro vypálení kódu na desce vašeho mikrokontroléru.
nahrát





Chcete-li stáhnout kód, klikněte zde.
Krok 6: Porozumění Kodexu
Kód tohoto projektu je docela dobře komentovaný a velmi snadno srozumitelný. Ale přesto je to stručně vysvětleno níže.
1. Na začátku se inicializují piny Arduina, které se později připojí k LED a bzučáku. Je deklarována také proměnná, která během běhu uloží některé hodnoty. Poté je počáteční stav PIR nastaven na LOW, což znamená, že je řečeno, že zpočátku není detekován žádný pohyb.
int ledPin = 5; // zvolte pin pro LED int Buzzer = 6; // vyberte pin pro Buzzer int inputPin = 2; // zvolte vstupní pin (pro PIR senzor) int pirState = LOW; // začneme, za předpokladu, že nebyl detekován žádný pohyb int val = 0; // proměnná pro čtení a ukládání stavu pinu pro další použití
2. neplatné nastavení () je funkce, při které inicializujeme piny desky Arduino, aby byly použity jako VSTUP nebo VÝSTUP. Přenosová rychlost je také nastavena v této funkci. Přenosová rychlost je rychlost bitů za sekundu, kterou mikrokontrolér komunikuje s externími zařízeními.
void setup () {pinMode (ledPin, OUTPUT); // deklarovat LED jako výstupní pinMode (bzučák, VÝSTUP); // deklarovat bzučák jako výstupní pinMode (inputPin, INPUT); // deklarovat senzor jako vstup Serial.begin (9600); // nastavit přenosovou rychlost rovnou 9600}3. neplatná smyčka () je funkce, která běží znovu a znovu ve smyčce. V této funkci je mikrokontrolér naprogramován, takže pokud detekuje pohyb, vyšle signál na bzučák a LED a zapne je. Pokud pohyb není detekován, nic neudělá.
void loop () {val = digitalRead (inputPin); // načíst vstupní hodnotu ze senzoru PIR if (val == HIGH) // Pokud je detekován pohyb před {digitalWrite (ledPin, HIGH); // rozsvítí LED diodu digitalWrite (bzučák, 1); // zapnout zpoždění bzučáku (5000); // vytvoří zpoždění pět sekund if (pirState == LOW) {// pokud je stav na počátku nízký, znamená to, že nebyl detekován žádný pohyb před // právě jsme zapnuli Serial.println ('Motion detected!'); // Tiskne na sériový monitor, že je detekován pohyb pirState = HIGH; // pirState je nastaven na HIGH}} else {digitalWrite (ledPin, LOW); // zhasne LED digitalWrite (bzučák, 0); // vypne bzučák if (pirState == HIGH) {// pokud je stav původně HIGH, znamená to, že byl detekován nějaký pohyb před // právě jsme vypnuli Serial.println ('Motion skončil!'); // Tisk na sériovém monitoru, že pohyb má konec pirState = LOW; // pirState je nastaven na LOW}}}Takže to byl celý postup výroby domácího zabezpečovacího obvodu pomocí PIR senzoru. Nyní můžete začít pracovat a vytvořit si vlastní nízkonákladový a efektivní bezpečnostní alarm.